




GUIDAGE LINEAIRE CURVILIGNE SIMPLE
Mis en application sur le tricycle RARTRIKE PGL, le guidage linéaire curviligne réalise un pivot mécanique dont l’axe est le centre de révolution du guidage linéaire. Dans cette application, largement inspirée, pour ce qui concerne la conception du système oscillant du TIGER TRIKE de Mr Alan MAURER, le pivot de direction des roues avant est incliné suffisamment pour que lors du braquage, il y ait un effet d’inclinaison (du même côté) du tricycle. Ce système Oscillant est très largement détaillé dans le texte du brevet d’invention « pivot virtuel dématérialisé à guidage linéaire curviligne ».
BRAS OSCILLANTS
Le système des bras oscillants est utilisé sur plusieurs tricycles de configuration « DELTA », comme le JETRIKE ou le VELOTILT. Nous avions décidé de faire rouler le Velotilt « en arrière », et donc de le transformer en un Tadpode. Cette configuration est celle du RARTRIKE PJE exposé en avril 2016 au salon du vélo spécial. L’articulation des deux bras oscillants se situe transversalement sous le siège du conducteur, et le mouvement des bras oscillants est synchronisé par un système de type « Jetrike ».
SYSTEME OSCILLANT JETRIKE
Le site Jetrike.com donne des explications très détaillées sur le fonctionnement et la réalisation de ce genre de système oscillant et nous ne pouvons que recommander la lecture attentive de l’article intitulé « How does Jetrike Works » à ce sujet. La géométrie des bras oscillants, du triangle de synchronisation et la position de chacun des éléments pivotants du système sont déterminants, et mon collègue constructeur du site Jetrike, grand adepte de l’open source n’est pas avare d’explications à ce sujet. Il apparaît important de conserver un « autocentering effect » (effet d’auto-centrage) du système d’oscillation à l’arrêt pour ne pas se renverser. Ce système oscillant est d’une remarquable stabilité et fait du RARTRIKE PJE un appareil très agréable à conduire.
PARALELLOGRAMME SIMPLE OU DOUBLE : AILES OSCILLANTES
Ceci est le type de mécanisme le plus répandu sur les tricycles oscillants tadpode. On le trouve sur le tripendo, le LEINER trike, par exemple, L’oscillation est réalisée par la déformation d’un parallélogramme (ou de deux parallélogrammes reliés par un système de suspension. Ce système est totalement instable à l’arrêt (il s’agit d’un pendule inversé) et nécessite donc un mécanisme de triangulation ou de régulation associé pour que les roues restent verticales. En mouvement, ce système oscillant fonctionne à peu de choses près comme un vélo ( « Think bike »).
GUIDAGE LINEAIRE COMBINE : PONT OSCILLANT MIXTE
Le pont oscillant mixte de RARTRIKE-France est le système mécanique le plus élaboré de notre entreprise pour gérer l’équilibre d’un tricycle oscillant.
Nous avons volontairement dissocié ici les termes « oscillant » et « pendulaire » pour la clarté de l’exposé. Oscillant classique s’entend comme fonctionnant sur le mode du pendule inverse, et pendulaire doit se comprendre au sens pendule vrai.
Oscillant classique = Pendule inverse (vélo) / Pendulaire = Pendule vrai (hamac)
La solution technique apportée pour pouvoir réaliser le système oscillant (classique ou pendulaire) est le pivot virtuel à guidage linéaire curviligne. (PGLc) Comme je l’explique dans le texte de mon brevet d’invention, ce système permet de placer un pivot mécanique au milieu d’un autre système mécanique en fonctionnement… et ici, le système mécanique dont il s’agit est la roue du tricycle.
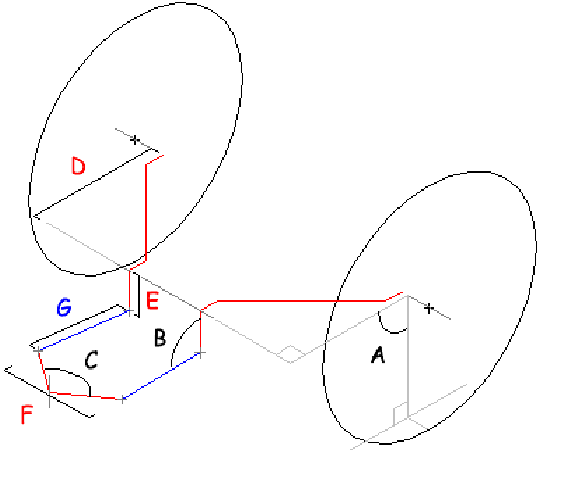
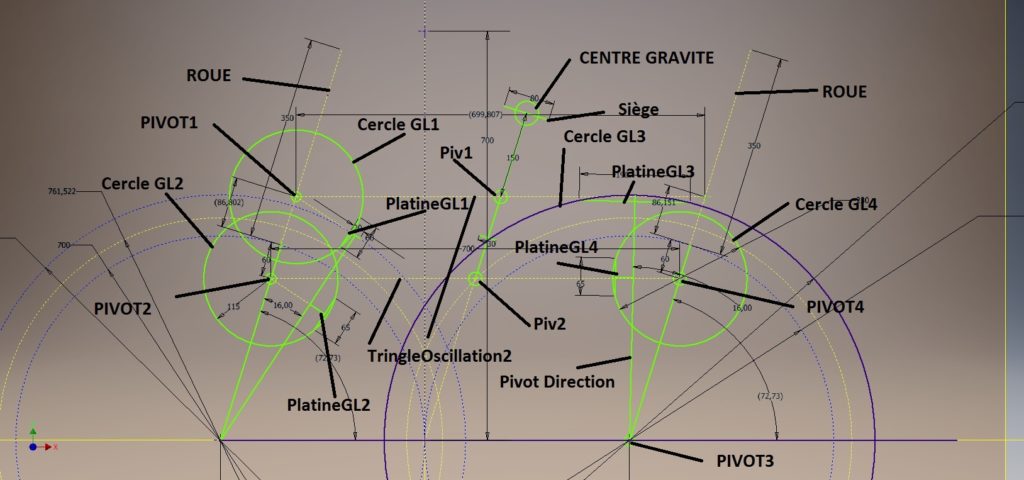
On doit regarder le schéma ci dessous séparément à droite (roue droite, tricycle oscillant classique) dans un premier temps, puis à gauche (roue gauche, tricycle pendulaire vrai) dans un deuxième temps, car les deux motions « tricycle oscillant » et « tricycle pendulaire » sont représentées respectivement à gauche et à droite sur le même dessin. J’expliquerai plus loin comment on peut réunir ces deux systèmes en un seul pour obtenir le tricycle oscillant mixte (oscillant et pendulaire).
Du côté gauche du dessin, le demi – mécanisme d’un tricycle de type oscillant classique, réalisé avec deux pivots (1 et 2) à guidage linéaire curvilignes (PGLc) fixés sur la colonne de direction et dont les centres géométriques sont situés dans le plan de la roue (propriété intrinsèque du PGLc). Le siège central représenté sur ce schéma est bien celui du tricycle oscillant classique dont nous avons commencé la description. Ce siège est est placé comme sur un vélo et représente le sommet d’un pendule inverse à régulation d’équilibre par la direction. Pour conduire un tricycle oscillant classique « you must think bike », ce tricycle fonctionne à peu de choses près comme un vélo. Les conducteurs de vélo couchés sont plus doués pour maîtriser ces tricycles que ceux qui ont pris l’habitude d’un tricycle NON oscillant classique. Le pendule inverse, instable, nécessite un système de triangulation à l’arrêt du tricycle.
Vue de face, les deux roues du tricycle représentées comme des segments de droite, de part et d’autre, et le tricycle est incliné, comme dans un virage.
Du côté droit du dessin, une partie du mécanisme d’un tricycle pendulaire, réalisé, lui aussi avec deux pivots (3 et 4) à guidage linéaire. Le pivot à guidage linéaire 3 est souverain dans la réalisation de ce tricycle pendulaire car il se situe sous le point de contact de la roue, exactement.
En imaginant en symétrie l’association du pivot 3 et du pivot 3′ (pour la roue controlatérale), on obtient la première condition d’un tricycle pendulaire vrai : deux points d’appui fixes situés sous les roues du tricycle, définissant avec le point d’appui de la roue arrière au sol un plan de référence.
La deuxième condition pour que ce tricycle fonctionne est la présence d’un pendule pilote. (Je reprends là l’idée exposée dans sa vidéo de mon collègue Pascal Rambeau de Montélimard.) Encore une fois, nous avons placé un Pivot à Guidage Linéaire tel une glissière en forme de gouttière sagittale pour créer ce siège pendulaire pilote, pivot dont l’axe (Sagittal et virtuel) se trouve au dessus du conducteur. Non représenté sur le schéma ci dessus, on peut appréhender le siège pendulaire pilote (en jaune, avec sa ligne virtuelle au dessus) sur une vue ci dessous du tricycle oscillant mixte (TOM). Dans cette illustration du TOM, le pivot à guidage linéaire en rose ci dessous (pivot 4 du dessin précédent) est en réalité celui qui permet le contrôle et la synchronisation de l’oscillation du tricycle. Le tricycle repose sur le pivot à guidage linéaire en rouge et bleu ci dessous (3 sur le dessin précédent), dont le centre géométrique est bien sous la roue. Le pivot rose / 4, lui, est piloté par le siège.
La comparaison de ce système avec celui du prototype RARTRIKE-PGL, est riche d’enseignements.
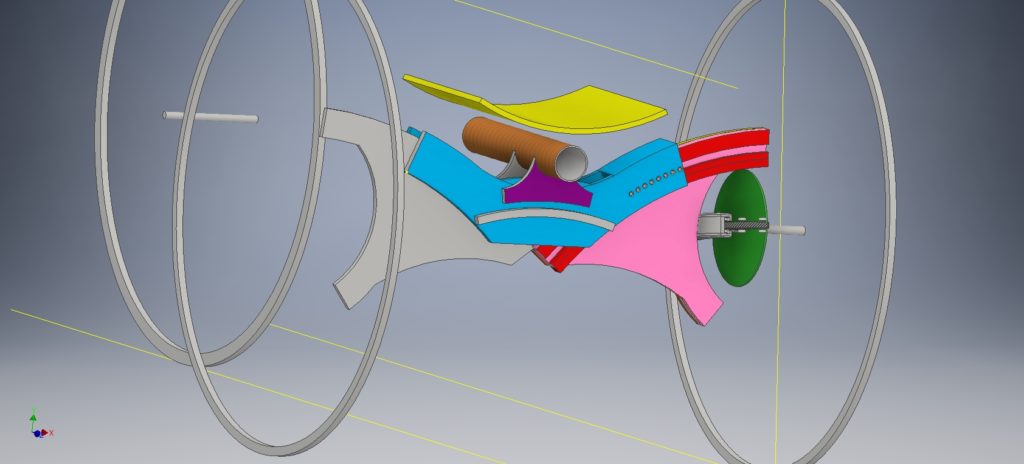
Siège Pendulaire Pilote (vue très simplifiée)